R
Rösti
Unconfirmed Member
On August 2, 2013, Sony Computer Entertainment Inc. and Tokyo Institute of Technology filed in the US via the USPTO a patent application titled "Interface apparatus". It was published today, on June 9, 2016. It concerns an interface apparatus, connected to a user's fingers, for presenting a force sense at a remote place or in a virtual space to a user.
It is a relatively short patent so I will try and include the majority of it in this post. First, general information and abstract. Most interesting parts in bold.
Inventors: HIROSE; Shigeo; (Tokyo, JP) ; ISHIDA; Hiroaki; (Tokyo, JP) ; YAMAGISHI; Takeshi; (Tokyo, JP) ; KAKE; Tomokazu; (Tokyo, JP) ; TOGAWA; Keiji; (Tokyo, JP)
Applicant:
Name City State Country Type
TOKYO INSTITUTE OF TECHNOLOGY Tokyo JP
SONY COMPUTER ENTERTAINMENT INC. Tokyo JP
Family ID: 1000001760451
Appl. No.: 14/908553
Filed: August 2, 2013
PCT Filed: August 2, 2013
PCT NO: PCT/JP2013/071069
371 Date: January 29, 2016
Abstract
In an interface apparatus for presenting a force sense at a remote place or in a virtual space to a user, the number of motors for exerting force upon fingers of the user is decreased. The interface apparatus includes a first arm and a second arm for being attached to the thumb and a finger other than the thumb, respectively. A motor includes a motor main body supported for rotation, and a rotary shaft that relatively rotates with respect to the motor main body. The rotary shaft is connected to the second arm. The motor main body is connected to the first arm so as to impart rotation thereof to the first arm.
Claims
1. An interface apparatus comprising: a first arm and a second arm mounted for opening and closing motion being attached to a thumb and a finger other than the thumb, respectively; and a motor configured to exert force in opening and closing directions on the first arm and the second arm and include a motor main body supported for rotation and a rotary shaft that relatively rotates with respect to the motor main body, the rotary shaft being connected to one of the first arm and the second arm while an other one of the first and second arms and the motor main body are connected to each other so as to impart rotation of the motor main body to the other one of the arms.
2. The interface apparatus according to claim 1, wherein the first arm is rotatable around a first axis; and the second arm is rotatable around a second axis positioned in a spaced relationship from the first axis.
3. The interface apparatus according to claim 1, wherein the motor is disposed in a posture in which the rotary shaft extends orthogonally to a plane on which the first arm and the second arm open or close.
4. The interface apparatus according to claim 3, wherein the motor is disposed between the first arm and the second arm.
5. The interface apparatus according to claim 4, further comprising: a motor case configured to accommodate the motor main body therein and support the motor main body for rotation; and a member positioned in a spaced relationship in a radial direction from the motor case and cooperating with the motor case to sandwich a hand of the user therebetween.
6.-13. (canceled)
Description
TECHNICAL FIELD
[0001] The present invention relates to an interface apparatus for presenting a force sense at a remote place or in a virtual space to a user.
BACKGROUND ART
[0002] Conventionally, development of an interface apparatus (Haptics apparatus) for presenting a force sense at a remote place or in a virtual space to a user, for example, for presenting counterforce received from an object in a virtual space to the user is advancing. As such an apparatus as just described, a pen type interface apparatus used in a state in which it is provided on a table, a floor or the like is proposed in Japanese Patent Laid-Open No. 2008-209689. Also a glove-shaped interface apparatus into which the user fits a hand thereof is proposed conventionally.
SUMMARY
Technical Problems
[0003] An interface apparatus that is used in a state in which it is placed on a table or a floor has a problem in that the user cannot use the interface apparatus while the user moves both hands in a space, and the interface apparatus has a problem in that it is restricted much in regard to a use form. Further, a glove-shaped interface apparatus includes a plurality of motors for moving fingers and has a problem in that the number of parts is great and the mechanism is complicated.
[0004] It is an object of the present invention to provide an interface apparatus that can decrease the number of motors and has a comparatively simple structure.
[0005] It is another object of the present invention to provide an interface apparatus that can be used while the user moves both hands in a space.
Solution to Problems
[0006] According to a form of the present invention, an interface apparatus includes a first arm and a second arm mounted for opening and closing motion being attached to a thumb and a finger other than the thumb, respectively, and a motor configured to exert force in opening and closing directions on the first arm and the second arm. The motor includes a motor main body supported for rotation, and a rotary shaft that relatively rotates with respect to the motor main body. The rotary shaft is connected to one of the first arm and the second arm while an other one of the first and second arms and the motor main body are connected to each other so as to impart rotation of the motor main body to the other one of the arms. With this interface apparatus, the number of motors required to move the arms can be reduced.
[0007] According to another form of the present invention, an interface apparatus includes a moving mechanism including a first portion and a second portion capable of relatively moving with respect to the first portion and having a driving apparatus moving one of the first and second portions, the driving apparatus being provided at an other one of the first and second portions. The interface apparatus further includes a first holding target unit configured to support the first portion and be held with one of upper limbs by a user, and a second holding target unit disposed in a spaced relationship in a leftward and rightward direction from the first holding target unit and connected to the second portion, the second holding target unit being permitted to perform at least one of rotation and change of a relative position thereof with respect to the first holding target unit by relative movement of the second portion, the second holding target being configured to be held with an other one of the hands of the upper limbs by the user. With this interface apparatus, a user can use this while moving both hands in a space, and the degree of freedom in the use form can be increased.
Drawings

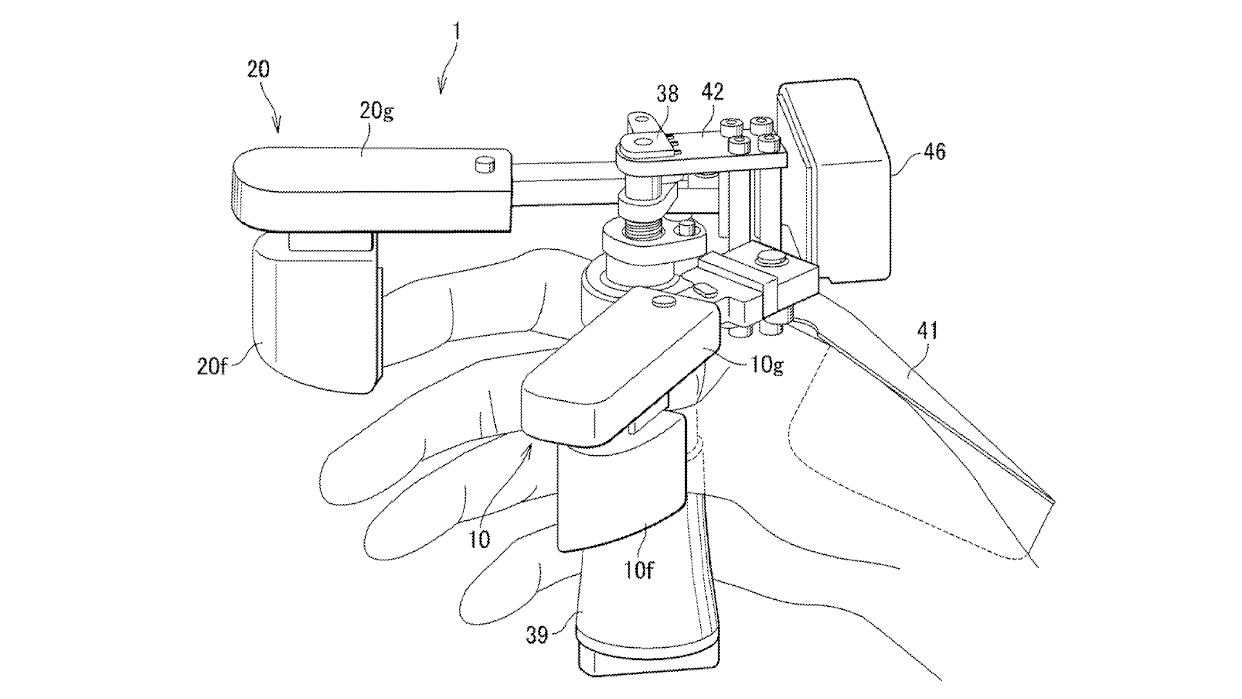
FIG. 1 is a perspective view of an interface apparatus according to a first embodiment of the present invention.
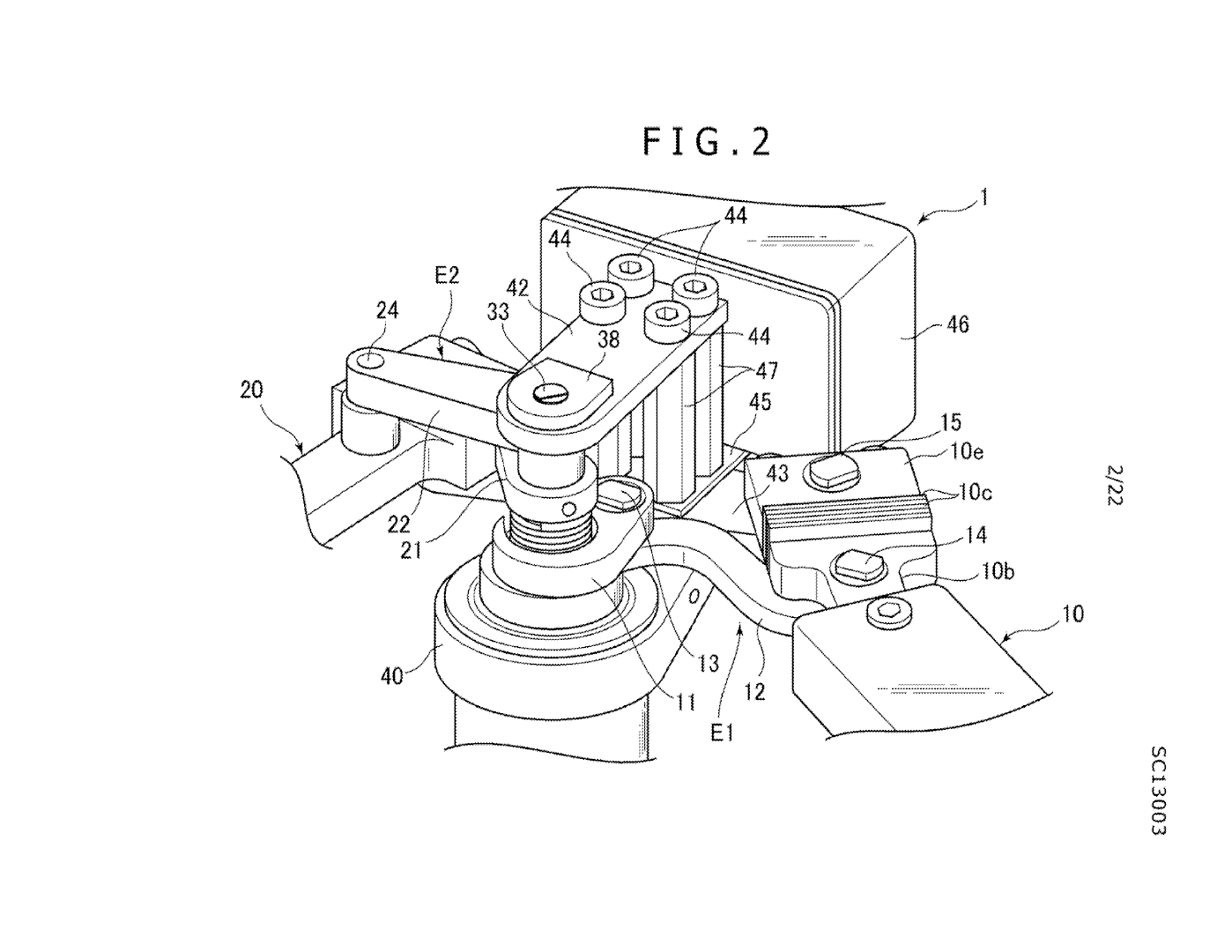
FIG. 2 is a perspective view of an upper portion of the interface apparatus.

FIG. 3 is a top plan view depicting a state in which two arms are opened.

FIG. 4 is a top plan view depicting a state in which the two arms are closed.

FIG. 5 is a sectional view taken along line V-V line depicted in FIG. 3.

FIG. 6 is a top plan view depicting a state in which the two arms are placed at an intermediate position between an open position and a closed position.

FIG. 7 is a sectional view taken along line VII-VII depicted in FIG. 6.

FIG. 8 is a perspective view depicting a first arm. This figure depicts a state in which a cover provided on the first arm is removed.

FIG. 9 is a top plan view of an interface apparatus according to a second embodiment of the present invention.

FIG. 10 is a top plan view of a position changing mechanism.

FIG. 11 is a rear elevational view of the position changing mechanism.

FIG. 12 is a perspective view of an arm configuring the position changing mechanism.

FIG. 13 is a perspective view depicting a differential apparatus that configures the position changing mechanism.

FIG. 14 is a sectional view taken along line XIV-XIV depicted in FIG. 10.

FIG. 15 is a sectional view taken along line XV-XV depicted in FIG. 10.

FIG. 16 is a top plan view of a rotation permission mechanism.

FIG. 17 is a rear elevational view of the rotation permission mechanism.

FIG. 18 is a right side elevational view of the rotation permission mechanism.

FIG. 19 is a sectional view of the rotation permission mechanism.

FIG. 20 is a perspective view depicting a supporting mechanism of an operation portion provided on a right holding target unit.
FIG. 21 is a side elevational view of the supporting mechanism.

FIG. 22 is a side elevational view of the supporting mechanism depicting a state in which the operation portion is opened in an upward and downward direction.
FIG. 23 is a sectional view of the right holding target unit obtained in a sectional plane represented by line XXIII-XXIII depicted in FIG. 21.
Description of embodiments (excerpts)
There are two embodiments, but I am only going to include excerpts from the first. The embodiments describe mainly how the different components of the apparatus can be configured, not so much about features.
First Embodiment
[0056] As depicted in FIG. 1, the interface apparatus 1 includes a first arm 10 and a second arm 20 mounted for opening and closing motion. The first arm 10 is an arm for being mounted on the thumb of the user. The second arm 20 is an arm for being mounted on a finger other than the thumb. In the example depicted in FIG. 1, the second arm 20 is mounted on the index finger.
[0057] The interface apparatus 1 includes a sensor for detecting an opening and closing angle of the arms 10 and 20. The interface apparatus 1 is connected by wire or wireless connection to an information processing apparatus such as a game apparatus or a personal computer, and transmits an output of the sensor to the information processing apparatus. In an example of a use form of the interface apparatus 1, if the user opens or closes the arms 10 and 20, then the interface apparatus 1 transmits a sensor output corresponding to the movement of the arms 10 and 20 to the information processing apparatus. On a display apparatus connected to the information processing apparatus, a displayed operation object such as a hand grips or releases a different object (operation target object).
[0083] As depicted in FIG. 8, a power sensor 10h is disposed on the inner side of the fingertip case 10f (in FIG. 8, an end portion of the fingertip case 10f is cut off in order to indicate the power sensor 10h). A portion with which a finger of the user is to contact is disposed on an inner face of the fingertip case 10f. A power sensor is provided also on the fingertip case 20f of the second arm 20. Consequently, force acting on the arms 10 and 20 when the user closes the arms 10 and 20 can be detected.
Source: Search for 14/908553 here[0144] It is to be noted that the present invention is not limited to the interface apparatus 1 and 2 described hereinabove and various alterations are possible.
[0145] For example, in the interface apparatus 1, the number of arms to be attached to fingers is not limited to two, but three or four arms may be provided. Further, the hand cover 41 may not necessarily be provided.
As usual, a patent application is not proof of a product being developed.
")

